Method
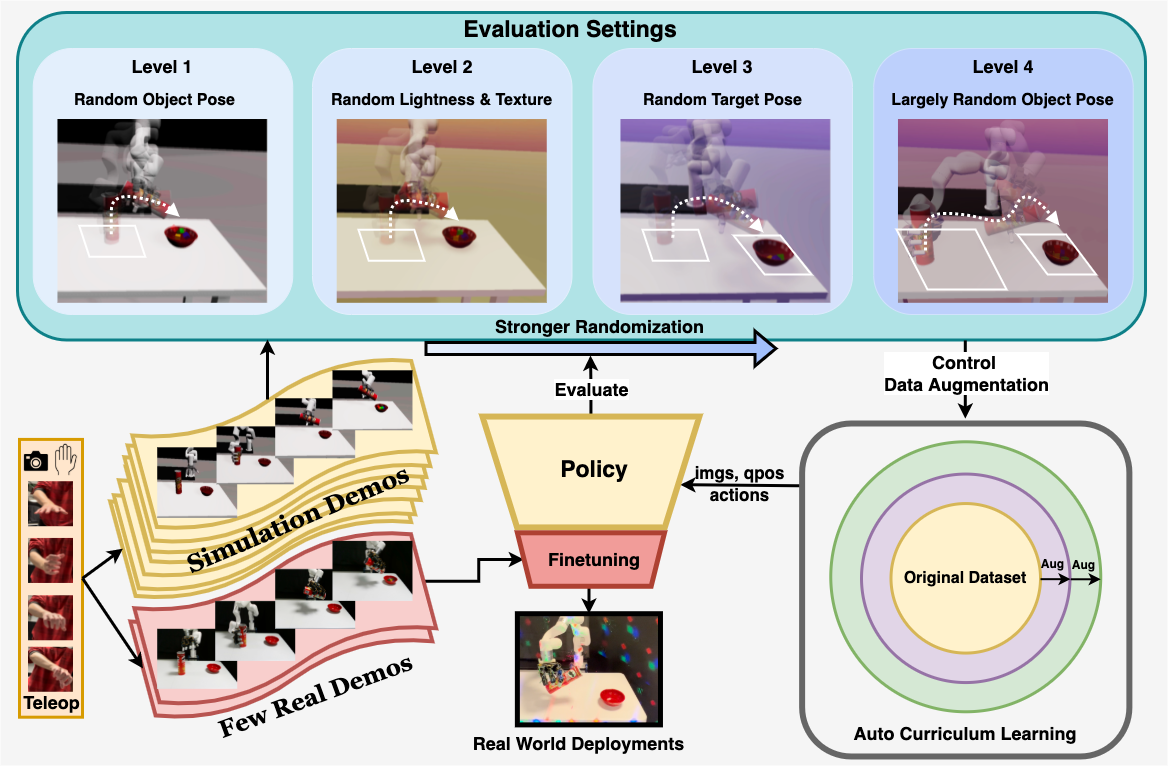
CyberDemo Pipeline. First, we collect both simulated and real demonstrations via vision-based teleoperation. Following this,
we train the policy on simulated data, incorporating the proposed data augmentation techniques. During training, we apply automatic
curriculum learning, which incrementally enhances the randomness scale based on task performance. Finally, the policy is fine-tuned with
a few real demos before being deployed to the real world.